 |
По вопросам ремонта и другим техническим вопросам сюда. Ремонт бытовой и офисной техники.
В 1785г. Кулоном был предложен метод измерения напряженности геомагнитного поля. С этого года в измерении параметров поля Земли применяется измерение его напряженности.
В бывшем СССР толчком в развитии магнитоизмерительной техники были исследования Курской магнитной аномалии и генеральная магнитная съемка всей страны (1930-1941гг.). Для этих грандиозных по масштабах исследований, впервые в мире, был разработан и отработан метод аэромагнитной съемки.
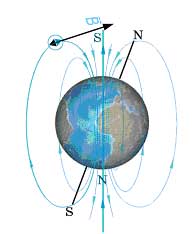
Магнитное поле Земли или геомагнитное поле. На удалении от поверхности Земли, порядка трёх её радиусов, магнитные силовые линии имеют диполеподобное расположение. Эта область называется плазмосферой Земли.
По мере удаления от поверхности Земли усиливается воздействие солнечного ветра: со стороны Солнца геомагнитное поле сжимается, а с противоположной, ночной стороны, оно вытягивается в длинный хвост.
Средняя напряженность магнитного поля Земли равна 30000 – 60000 nТл. (нано Тесла) и сильно зависит от географического положения. Напряжённость магнитного поля на магнитном экваторе около 34000 nТл., у магнитных полюсов около 66000 nТл. В некоторых районах (в так называемых районах магнитных аномалий) напряжённость резко возрастает. В районе Курской магнитной аномалии она достигает 200000 nТл. Поле в большинстве своем выходит из Земли и генерируется движением жидкой лавы в ядре земного шара.
Магнитное поле Земли это векторная величина, вектор которого стремится к магнитным полюсам Земли. Направление магнитных линий этого поля на противоположных полусферах формируют магнитные полюса. Точки Земли, в которых напряжённость магнитного поля имеет вертикальное направление, называют магнитными полюсами. Таких точек на Земле две: северный магнитный полюс и южный магнитный полюс.
Магнитные полюса Земли не совпадают с географическими полюсами и постоянно мигрируют.
На рисунке показана миграция северного магнитного полюса с 1600 по 2000 гг.
Характеристику наклона силовых линий магнитного поля в выбранной точке земной поверхности называют магнитным наклонением данного места. Её открыл в 1576 г. англичанин Роберт Норманн.
Эскиз из книги английского физика Уильяма Гильберта (1544—1603) <О магните, магнитных телах и о великом магните — Земле>, демонстрирует, как ориентируются магнитные иглы на поверхности модели Земли.
Угол наклона магнитных игл увеличивается по мере удаления от экватора, на экваторе они располагаются горизонтально земной поверхности, у полюсов – перпендикулярно.
Магнитное поле Земли имеет две компоненты вертикальную и горизонтальную. Это значит, что для измерения магнитного поля земли нужен, минимум, двухосный датчик, или протонно прецессионный магнитометр. Последнему не важен вектор поля, им измеряется только действительная напряженность. Напряженность магнитного поля одинаковых широт будет приблизительно одной величины.
Напряженность магнитного поля не стабильная и не однородная величина. Имеют место частые возмущения и магнитные бури изменяющие локальную напряженность поля на 100 – 500 nТл. Магнитные бури вызываются возмущением токов, распространяющихся в ионосфере под влиянием солнечного ветра. При измерении магнитного поля медленными дискретными приборами эта неоднородность поля во времени проявляется особенно заметно. Для устранения погрешности нужно производить замеры по нескольку раз.
Свободны от названных недостатков магнитометры – гадиентомеры.
Градиентомеры замеряют магнитное поле в двух точках земли одновременно и индицируя величину напряжения разностного сигнала. Любые локальные возмущения магнитных полей ими компенсируются конструкционно.
Потому что поле локального возмущения вызывает одинаковый сигнал с двух датчиков. Поскольку градиентомер реагирует только на величину разности сигналов с датчиков, такое возмущение на показаниях не отобразиться, так как величина уровня сигнала будет одинаковой. При разностном сигнале, будет четко обнаруживаться аномалия.
Такими приборами можно также искать относительно мелкие объекты. Например, колодцы, куски железа и т. д. Градиентомеры могут быть на базе любых типов магнитометров. Самый оптимальный тип магнитометров для градиентомера – прецессионный. В нем не нужно точно и жестко юстировать датчики. Конструкция прибора состоит из двух, разнесенных на 1 – 1,5 метра по штанге, одинаковых датчиков, с одним блоком обработки. Если датчики магнитных полей векторные, то и градиентомер будет векторный прибор. Оптимально для измерения делать градиентомеры на базе протонных прецессионных магнитометров. Они не зависят от вектора и будут работать при любой ориентации.
Вектор магнитного поля меняется в зависимости от неоднородности грунта и наличие в грунте намагничивающихся предметов, например, из железа. Поэтому для правильного измерения магнитного поля применяются двух и трех осные датчики магнитного поля. Чтобы контролировать изменение вектора магнитного поля во всех координатах, иначе можно пропустить интересное.
В системе единиц СИ напряженность магнитного поля измеряют в Теслах.
1Тл. Это индукция магнитного поля, в котором на каждый метр длины проводника действует сила тока, равная 1 Ньютону.
• 1 Тл = 10 000 Гаус (единица СГС)
• 1 Тл = 1•10^9 Гамма (единица, применяемая в геофизике)
• 1nТл.(нано Тесла) = 1 Гамма = 10мкГс.
• 1мкТл.(микро Тесла) = 1000nТл.
Для измерения напряженности магнитного поля существуют магнитометры.
Магнетометры по конструкции различают механические, когда измерение поля происходит намагниченной стрелкой, вращающейся на своей оси и электронные приборы.
Механический магнитометр М - 15 измеряет горизонтальную компоненту магнитного поля.
Механический магнитометр М – 27м измеряет вертикальную компоненту магнитного поля.
Чувствительность таких приборов – единицы nТл.
Из электронных приборов ферро зонд является наиболее простым для повторения.
Такие приборы используются на самолетах в качестве магнитных компасов.
Чувствительность феррозондовых приборов порядка 0,1 nТл. , определяется качеством датчика и стабильностью схемы.
Феррозонд является векторным прибором. Его показания зависят не только от силы магнитного поля, но и от направления его силовых линий (от его вектора).
Наиболее известны феррозондовые магнитометры Немецкой фирмы доктора Ферстера – OGF, Ferex 4.021, Ferex 4.032. Ferromex 120, фирмы Unimex Handels Gmbh (Германия). Московской фирмы Ака Контроль – ФТ 100.
Феррозондовые приборы основаны на измерении параметров предсказуемого изменения внутренних свойств ферромагнитных сердечников, под влиянием магнитных полей, протекающих по известным законам. Близкие принципы действия у магнитных преобразователей.
Датчик феррозондовых приборов представляет собой катушку индуктивности с нелинейным сердечником, реагирующим на изменения магнитных полей по известным науке законам. Особенности сердечника являются стабильность всех необходимых для измерения показателях. Если реакция сердечника меняется в некоторых пределах, то необходимо, чтобы этот разброс показаний, был одинаков и линеен под влиянием различных внешних факторов, на протяжении всего времени. Материалы для сердечника, удовлетворяющие приведенным условиям могут быть пермаллой, железо с разрушенной кристаллической решеткой (аморфное железо, на подобие ГАММАМЕТОВ) и т. д.
В 1906 году французский физик Пьер Кюри доказал, что при сильном нагревании магнитная субстанция теряет магнетизм (железо — уже при 760OС, а никель — при 356). Поэтому для нейтрализации собственных полей - чтобы не было потерь на гистерезисе и механических натяжений - приводящих к изменениям формы, материал для сердечника нужно прокалить до определенной температуры с медленным остыванием.
Кроме того, с целью устранения анизотропии пермаллоя, обусловленной его текстурой, а так же исключения эффекта его остаточной продольной намагниченности, на поверхность сердечника наносятся специальные насечки, искривляющие направления переменных и постоянных магнитных полей, таким образом, что на отдельных микро участках сердечника потоки становятся параллельными.
Теоретический принцип действия феррозондовых датчиков.
Стержневой двух компонентный датчик феррозонда.
Если через катушку возбуждения, намотанную на ферромагнитном сердечнике создать ПЕРЕМЕННОЕ магнитное поле со стабильной напряженностью и приложить к феррозонду ПОСТОЯННОЕ магнитное поле (измеряемое) с неизвестной напряженностью, то на концах приемной катушки датчика появиться напряжение, амплитудой пропорциональное измеряемому магнитному полю, но с частотой в два раза высшей от частоты тока, создающего на обмотке возбуждения переменное магнитное поле.
Появление второй гармоники обусловлено нелинейной характеристикой примененного сердечника, по амплитуде этого сигнала измеряют напряженность магнитных полей.
Математическая модель датчика на столько совершенна, изучена, легко повторяемая и легко адаптируемая для любых условий применения, что области их применения практически безграничны.
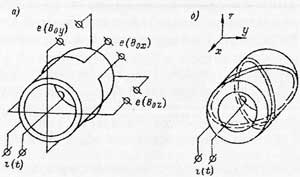
На рисунке изображен простейший трехкомпонентный феррозонд на трубчатом сердечнике. Такой сердечник в отличие от тороидального и стержневого намагничивается от трех компонент внешнего поля. Ток возбуждения подается в тороидальную обмотку, нанесенную равномерно по окружности трубки. Поверх обмотки возбуждения взаимно ортогонально размещены три измерительные обмотки, в которых наводятся ЭДС, пропорциональные соответствующим компонентам измеряемого поля.
Феррозондовые приборы используются для поиска природных ресурсов, месторождений, изучения пространственно временной структуры магнитного поля Земли и планет, ориентирование и местонахождения объектов, в том числе подвижных в поле Земли, (в навигационных системах), в системах следящих приводов, контроля качества сталей, изделий, для автоматизации производственных процессов, в системах считывания информации, для изучения структуры геомагнитного поля и полей космического пространства. Применяются также для поиска объектов не геологического происхождения. Этот список практически безграничен.
Магнетометр на базе магнито резистивных преобразователей - магниторезиторах.
По сложности изготовления такой прибор приравнивается к феррозондовым приборам.
Отличительной особенностью является способность магниторезистивных датчиков сохранять работоспособность при статических магнитных полях в широком температурном диапазоне.
Чувствительность магнитометров с датчиками на магниторезисторах единицы nТл.
Для работы с магниторезисторами необходима подача импульсов на выводы катушки сброса/установки датчика, током до 0,5 А., длительностью 1 мк.сек.
Магниторезистивные датчики применяются в магнитометрии для решения различных задач: определения угла поворота, положения объекта относительно магнитного поля земли, измерения частоты вращения зубчатых колес и др.
Принцип работы магниторезисторов аналогичен датчикам Холла, но магниторезисторы работают на больших расстояниях магнит-датчик. Датчики работают на скоростях 0...10 кГц.
К числу преимуществ магниторезистивных датчиков можно отнести:
- отсутствие зависимости от расстояния между магнитом и датчиком;
- широкий диапазон рабочих температур (от –55 до 150°С);
- датчики зависят только от направления поля, а не его интенсивности;
- долгий срок службы, независимость от магнитного дрейфа.
Магниторезисторы обладают большой чувствительностью. Она лежит в пределах от 10Е-13 до 10Е-4 А/м. Наибольшей чувствительностью обладают магниторезисторы изготовленные из InSb-NiSb.
Магниторезистивные датчики применяются для:
- контроля перемещений объектов в робототехнике
- измерения слабых полей (системы навигации, компенсация поля Земли, электронные и цифровые компасы и т.д.)
- измерения частоты вращения (КПП, АБС, системы управления двигателем)
- измерения угловой координаты (например, для регулировки сидения, в посудомоечных машинах, в системах рулевого управления, для регулировки фаз и т.д.)
- построения бесконтактных датчиков тока с гальванической развязкой.
Датчики позволяют измерять самые слабые магнитные поля (от 30 мкГаусс) с последующим их преобразованием в выходное напряжение. В конструкции датчика могут быть объединены несколько мостовых схем, образуя, таким образом, двух и трех осевые сенсоры.
Основными характеристиками магниторезисторов являются:
электрическое сопротивление Ro при отсутствии магнитного поля, функция преобразования (зависимость сопротивления, от значения магнитной индукции),
коэффициент относительного изменения сопротивления,
допустимое значение тока через магниторезистор, а также
температурный коэффициент сопротивления.
Основной характеристикой магниторезисторов является зависимость RB = f(B). В области малых значений магнитной индукции эта зависимость носит квадратичный характер, а при повышении магнитной индукции зависимость сопротивления магниторезистора от значения индукции магнитного поля становится линейной.
Как и для других полупроводниковых датчиков, для магниторезисторов характерна значительная зависимость сопротивления от температуры.
Магниторезисторы имеют заметную частотную зависимость, которая, в свою очередь, зависит от формы магниторезистора. В частности, для диска Корбино частотная зависимость практически не проявляется, а для магниторезисторов прямоугольной формы при изменении частоты от 0 до 10 КГц отношение RB/RO уменьшается примерно на 7... 10 %.
Важным параметром магниторезисторов является допустимое значение тока через магниторезистор (/ДОп), которое ОГРАНИЧЕНО допустимым перегревом прибора. В технической документации на магниторезисторы обычно задают допустимое значение тока через магниторезистор.
В области слабых полей чувствительность MP (изменение его сопротивления при изменении индукции) резко падает. Квадратичная зависимость относительного изменения сопротивления от магнитной индукции обусловливает наличие в электрической цепи постоянной составляющей, пропорциональной квадрату действующего значения индукции. Эта особенность используется при создании схем сравнения индукций переменного и постоянного магнитного поля.
Для повышения чувствительности в области слабых полей применяют вспомогательное поле подмагничивания. Однако при этом возникают искажения измеряемого поля вспомогательным.
Подобные схемы преобразования индукции переменных магнитных полей имеют приведенную погрешность 2,5 % при пределах изменения индукции 0,2...0,5 Тл в частотном диапазоне 40...20000 Гц .
При подмагничивании постоянным магнитным полем в слабых магнитных полях можно линеаризовать общую функцию преобразования индукции в приращение магнитосопротивления, если использовать два магниторезистора, один из которых находится в магнитном поле с индукцией (Во + В*), а второй с индукцией (Во — В*).
Подобный принцип положен в основу реализации перемножающего устройства с погрешностью 0,2 % при частотном диапазоне входных сигналов до 10 кГц. Перемножители на магниторезисторах имеют ряд преимуществ перед перемножителями на преобразователях Холла:
1) простота конструкции (только два электрода);
2) не требуют компенсации неэквипотенциальности (правда, зачастую необходимо создавать начальное магнитное поле);
3) имеют большую выходную мощность и т. п. В слабых магнитных полях (до 0,3...0,5 Тл) магниторезисторы могут служить основными элементами удвоителей частоты.
Их можно использовать также для построения смесителей частот, модуляторов, анализаторов спектра, усилителей, генераторов, функциональных преобразователей и т. п.
Основные параметры магниторезистивных датчиков.
Напряжение питания, B
Сопротивление моста, Ом
Крутизна характеристики, мВ/В/Э
Начальное смещение моста (технологический разбаланс моста), мВ/В
Максимальная величина измеряемого поля, Э
Температурный уход нулевого сигнала, мкВ/°С
Температурный дрейф, %/°С
Ток подмагничивания, мА
Перечисленных выше характеристик можно добиться на резисторах фирмы Honeywell, конструкция датчика, высокие параметры и наличие в нем катушек управления позволяет управлять режимом измерения, введением дополнительных компенсаций и корректировок.
Принцип работы магниторезистивных датчиков фирмы Honeywell основан на изменении направления намагниченности внутренних доменов слоя пермаллоя (NiFe) под воздействием внешнего магнитного поля. В зависимости от угла между направлением тока и вектором намагниченности изменяется сопротивление пермаллоевой пленки. Под углом 90° оно минимально, угол 0° соответствует максимальному значению сопротивления.
Конструкция магниторезистивных датчиков НМС1002, фирмы Honeywell, состоит из четырех пермаллоевых слоев, которые организованы в мостовую схему. Кроме того, на плату датчика добавлены две катушки: SET/RESET и OFFSET. Катушка SET/RESET создает легкую ось, которая необходима для поддержания высокой чувствительности датчика, катушка OFFSET предназначена для компенсации воздействия паразитных магнитных полей (созданных, например, каким-либо ферромагнитным объектом или металлическими предметами). Полезный сигнал снимается с одной диагонали моста.
Основные параметры стандартизированы, не дадо ничего думать. Характеристики датчика определяют характеристики прибора.
Конструктивно датчик представляет собой тонкопленочный магниторезисторный мост, напыленный на кремниевую подложку. На этой же подложке размещены две тонкопленочные катушки. Одна из них, Lком, предназначена для компенсации «паразитного» магнитного поля и выбора рабочей точки моста, другая, Lсм, - для модуляции сигнала (см. рис.).
Все устройство размещается в стандартном пластмассовом корпусе ИС.
Приборы НМС 1001, НМС 1002, НМС 1021, НМС 1022, НМС 2002, НМС 2003 отличаются количеством элементов в одном корпусе и уровнем магнитоэлектрических параметров.
Магнитная чувствительность магниторезисторных микросхем серии НМС составляет 10-30 (мВ/В)/мТл.
Напряжение питания микросхем - 1-12 В при токе потребления не более 10 мА.
Микросхемы размещаются в пластмассовых корпусах габаритами от 5x4x1,8 до 7,8x21,1x4,3 мм.
Диапазон рабочих температур ИС находится в пределах от -40...+85 °С до -55...+125 °С.
У фирмы Хонивел для измерения магнитных полей по трем пространственным координатам есть хороший, точный и стабильный, трех осевой магниторезистивный датчик НМС2003.
Магнитный датчик НМС 2003 является более сложным магнитоэлектронным устройством. В его конструкции, выполненной в виде гибридной микросхемы, размещаются по одной ИС типа НМС 1001 и НМС 1002 и четыре операционных усилителя, предназначенных для предварительного усиления сигнала.
Этот прибор позволяет производить измерение магнитного поля в трех взаимно перпендикулярных направлениях, по осям X, Y, Z.
Все элементы прибора размещаются на миниатюрной керамической плате с максимальными габаритами 25,5x19,2x12,5 мм.
Следующими по уровню сложности идут
ПРОТОННЫЕ ПРЕЦЕССИОННЫЕ МАГНЕТОМЕТРЫ ХАРЬКОВ АРТРАДИОЛАБ,
построеные на явлении ядерного магнитного резонанса (ЯМР). В них реализованы фундаментальные принципы физики атомного ядра.
Работа таких измерителей основана на измерении резонансной частоты свободной ядерной прецессии при деполяризации богатой протонами жидкости, зависимость частоты которой от напряженности измеряемого поля считается по формуле Fr=B/23,4874Hz. ; B=23,4874*Fr, где Fr - частота в Гц, В – величина индукции внешнего магнитного поля в nT. Одной нано Тесле соответствует частота 0,0426 Гц.
Получается, что прецессионные преобразователи преобразуют магнитное поле в переменное напряжение, прецессии ядер в образце, частота которого строго пропорциональна величине измеряемой магнитной индукции. В связи с тем, что в итоге мы измеряем частоту, получается очень большая точность измерения. Потому как частоту, возможно, измерять с очень большой точностью.
В протоно содержащей жидкости оси всех вращающихся вокруг своей оси протонов направлены вдоль линий магнитного поля, то есть поляризованы дейсвующим магнитным полем. Если дополнительным магнитным полем поляризовать оси протонов, развернув их на угол 90 градусов по направлению к линиям измеряемого магнитного поля, то сразу после рассеяния поля поляризации, оси вращения протонов начнут прецессировать по направлению линий измеряемого магнитного поля. Частота прецессии осей протонов зависит от величины магнитного поля через коэффициент пропорциональности 23,4872nТл/Гц. Например, в наших широтах, частота прецессии будет равно около 2000Гц и напряженность магнитного поля будет 2000х23,4872=46,974 nТл.
Зависимость частоты прецессии от напряженности магнитного поля, есть атомная константа, известна как частота Лармора. По таким константам и ведутся все вычисления для преобразования результатов в единицу измерения. Получается довольно точный и стабильный прибор с хорошей чувствительностью.
Закон Лармора не выполняется для слабых магнитных полей менее 3kT. Здесь преобладает хаотическое смещение магнитной оси протона вследствие термических эффектов и прочих межмолекулярных взаимодействий, порождающих электромагнитные шумы.
Для прецессионных приборов не требуется калибровка, компенсация или настройка, ориентация в магнитном поле Земли, у них отсутствует температурный дрейф параметров.
Протонные магнитометры не привязаны до вектора магнитного поля.
Ядерно – прецессионные датчики приобретают диаграмму направленности только за счет наложения вспомогательного поля заранее известного направления и величины. Это усложняет, удорожает прибор и вносит определенную погрешность в результат измерения. По этому где нужно измерять напряженность вектора магнитного поля применяются феррозонды или приборы на магниторезисторах.
Теоретическая модель работы измерителей прецессии.
И так, ядерный магнитометр измеряет частоту прецессии ядер. Прецессия это кратковременный процесс зависящий от свойств поляризирующейся жидкости (образца). Для различных жидкостей длится 0,5-3 секунды. При условии, что датчик рассчитан правильно и не влияет на процесс прецессии.
Чтобы создать условия прецессии ядерного резонанса необходимо повернуть вектор намагниченности на 90 градусов по отношению с вектором измеряемого магнитного поля. Поворот осей на 90 градусов необходим потому, что это максимально удаленная точка от оси измеряемого поля, значит будет максимально долгий путь прецессирования ядер от вектора поляризации до вектора измеряемого магнитного поля, а следовательно и время прецессии осей ядер. Для этого применяют принудительную поляризацию образца искусственно создаваемым электромагнитным полем, по длительности позволяющим повернуть ядра на 90 градусов. На время поляризации отключают датчик от измерителя, во избежания выхода из строя входных цепей.
После поворота магнитных осей ядер образца на 90 градусов, подключают датчик к измерительному устройству и на протяжении первых двух третей периода прецессии проводят замер частоты сигнала. Замер проводят в начале периода прецессии потому, что под конец он затухает до уровня шумов.
Дополнительная информация в статье
СПИН В ПРЕЦЕССИОННОМ МАГНИТОМЕТРЕ.
Дальше идет следующий цикл измерений.
Особенности изготовления датчика.
Отношение добротности катушки и начальной намагниченности к объему жидкости должно соответствовать расчетным значением. Если в датчике одна обмотка используется при поляризации и при приеме сигнала прецессии, катушку нужно рассчитывать, учитывая особенности обоих режимов.
Преобразователи прецессии по конструкции бывают с поверхностной наружной катушкой.
Датчики с наружной катушкой характеризуются повышенным в несколько раз энергопотреблением и существенно меньшим напряжением полезного сигнала.
Бывают резонансные и широкополосные.
У резонансных датчиков меньше энерго потребление и больше амплитуда принимаемого сигнала.


Датчики с внутренней катушкой, погруженной в жидкость, характеризуются самым низким энергопотреблением и самым большим напряжением полезного сигнала.
 |
Бывают резонансные и широкополосные. У резонансных датчиков меньше энерго потребление и больше амплитуда принимаемого сигнала. |
Преобразователи прецессии по методу создания начальной намагниченности можно разделить на одно катушечные и комплексные.
Расчет катушки для режима измерения прецессии для одно катушечного датчика.
Нужно рассчитать размеры, добротность и количество витков катушки датчика для получения резонанса на необходимых частотах с заданной шириной каждого диапазона.
Расчет катушки для режима поляризации.
Нужно проверить расчетами возможность поляризации образца на угол вектора поляризации равным 90 градусам, за определенное время при определенном напряжении и токе поляризации, при расчетных для измерения прецессии параметрах катушки.
Амплитуда сигнала пропорциональна добротности катушки, объему образца, полю поляризации и измеряемому полю, площади контакта катушки с жидкостью, коэфициенту заполнения – приблизительно равному отношению объема образца к объему катушки.
Для защиты от помех катушки хорошо экранируются не магнитными материалами с разрезами, иначе после выключения сигнала поляризации в катушке будут возбуждаться токи Фуко. Саму катушку изготовляют астатической.
Тороидальная катушка наиболее защищенная от помех по своему строению.
При расчете конструкции датчика нужно учитывать время убывания поляризующего сигнала.
Если сигнал поляризации убывает до нуля за время намного меньшее периода прецессии, вектор ядерной намагниченности не меняет своего направления и лежит вдоль линий поля поляризации и перпендикулярно измеряемого магнитного поля.
Если сигнал поляризации убывает до нуля за время намного большее периода прецессии, то вектор ядерной намагниченности устанавливается вдоль линий измеряемого магнитного поля, при таком положении вектора, полезный сигнал отсутствует. Если конструкцией катушки это решить не удается, нужно наложить перпендикулярно измеряемому магнитному полю импульс переменного магнитного поля, параметры которого рассчитываются отдельно.
Сложность схемы прибора, получается от сложности схемного исполнения алгоритма выполнения цикла измерения, от сложности измерения частоты до двух знаков после запятой за очень короткий промежуток времени и перевод показаний в единицы измерения Тл., сложность усиления низкого уровня входного сигнала.
Алгоритм выполнения цикла измерения решается применением микроконтроллера, или специализированных микросхем с высоким уровнем интеграции.
Пересчет частоты. Если сформировать импульс длительностью в 100 колебаний частоты входного сигнала и измерять за этот период частоту 1МГц., точность и скорость измерений повыситься в разы. Но для этого нужна стабильная схема преобразователя с фазовой синхронизацией. Эта задача так же решается применением микроконтроллера, или специализированных микросхем с высоким уровнем интеграции.
Поднятие уровня входных сигналов решается применением узкополосных фильтров и малошумящих операционных усилителей, экранирование датчика и входных цепей.
Разбор понятия прецессии осей протонов на примере детской игрушки юлы.
Раскручиваем детскую игрушку. После набора хороших оборотов она принимает стабильное положение в пространстве. Теперь наклоним ось вращающейся юлы. Сразу, после отпускания руки начнется круговое вращение конца оси вращающейся юлы, принимающее со временем снова недвижимое, устойчивое состояние. Это называется протон прецессирует к направлению вектора измеряемого магнитного поля. Как только ось юлы перестала двигаться, это значит, протон поляризовался измеряемым магнитным полем и магнитные оси протона стали в одном направлении с вектором измеряемого магнитного поля.
Детская юла получается тот же ГИРОСКОП в наглядном представлении. Основное свойство гироскопа – удержание направления оси при вращении устройства в пространстве.
Сила поперечного давления на ручку оси вращающейся юлы – это величина дополнительного магнитного поля, приложенного к поляризационной жидкости, для поляризации протонов с разворотом осей.
Время удержания наклона – длина поляризующего импульса.
Величина наклона оси – величина поворота осей вращающихся протонов. В идеале, нужно повернуть оси протонов на 90 градусов от направления линии измеряемого магнитного поля. Тогда будет максимально долгое время прецессии протонов.
Время установки юлы в стабильное положение после расбаланса – время, за которое прибор должен настроиться, провести все необходимые замеры, обработку параметров измеряемого сигнала и вывести результат.
В 1953 г. А. Оверхаузер показал, что возбуждение электронного парамагнитного Резонанса, основанное на динамической поляризации ядер, приводит к установлению в образце значительной ядерной поляризации, во много paз превышающей поляризацию постоянным магнитным полем в итоге повышается быстродействие и повышается чувствительность измерителя.
Развившиеся в результате этих исследований методы получили название динамических методов ориентации ядер.
В качестве образца, в таких приборах применяют жидкости, содержащие частицы, как с ядерным, так и с электронным магнитным моментом, например, водные растворы соли Ферми – нитродисульфаната калия.
При динамической поляризации ядер, их намагниченность возрастает в 500 раз, по отношению к статической поляризации. Достигается такой результат путем наложения на образец переменного поля с частотой кратной прецессии электронов – их магнитного резонанса. При облучении образца резонансной частотой все протоны постоянно находятся в состоянии механического резонанса и в стадии максимальной чувствительности на малейшие изменения магнитного поля.
ЯДЕРНЫЙ МАГНИТНЫЙ РЕЗОНАНС
Ядерный магнитный резонанс (ЯМР) – резонансное поглощение электромагнитных волн атомными ядрами, происходящее при изменении ориентации векторов их собственных моментов количества движения (спинов). ЯМР возникает в образцах, помещённых в сильное постоянное магнитное поле, при одновременном воздействии на них слабого переменного электромагнитного поля радиочастотного диапазона (силовые линии переменного поля должны быть перпендикулярны силовым линиям постоянного поля). Для ядер водорода (протонов) в постоянном магнитном поле напряжённостью 10^4 эрстед резонанс наступает при частоте радиоволн 42.58 МГц. Для других ядер в магнитных полях 10^3–10^4 эрстед ЯМР наблюдается в диапазоне частот 1–100 МГц.
ЯМР широко используется в физике, химии и биохимии для исследования структуры твёрдых тел и сложных молекул. В медицине с помощью ЯМР с разрешением 0.5–1 мм получают пространственное изображение внутренних органов человека.
Рассмотрим явление ЯМР на примере простейшего ядра – водорода. Ядро водорода это протон, имеющий определённое значение собственного механического момента количества движения (спина). В соответствии с квантовой механикой вектор спина протона может иметь только два взаимно противоположных направления в пространстве, условно обозначаемых словами “вверх” и “вниз”. Протон имеет также и магнитный момент, направление вектора которого жёстко привязано к направлению вектора спина. Поэтому и вектор магнитного момента протона может быть направлен либо “вверх”, либо “вниз”. Таким образом, протон можно представить как микроскопический магнитик с двоякой возможной ориентацией в пространстве.
Если поместить протон во внешнее постоянное магнитное поле, то энергия протона в этом поле будет зависеть от того, куда направлен его магнитный момент. Энергия протона будет больше в том случае, если его магнитный момент (и спин) направлен в сторону, противоположную полю. Эту энергию обозначим  . Если магнитный момент (спин) протона направлен в ту же сторону, что и поле, то энергия протона, обозначаемая
. Если магнитный момент (спин) протона направлен в ту же сторону, что и поле, то энергия протона, обозначаемая  , будет меньше (< ). Пусть протон оказался именно в этом последнем состоянии. Если теперь протону добавить энергию Е = - , то он сможет скачком перейти в состояние с большей энергией, в котором его спин будет направлен против поля. Добавить энергию протону можно, “облучая” его квантами электромагнитных волн с частотой
, будет меньше (< ). Пусть протон оказался именно в этом последнем состоянии. Если теперь протону добавить энергию Е = - , то он сможет скачком перейти в состояние с большей энергией, в котором его спин будет направлен против поля. Добавить энергию протону можно, “облучая” его квантами электромагнитных волн с частотой  , определяемой соотношением
, определяемой соотношением  Е =
Е =  .
.
Перейдём от отдельного протона к макроскопическому образцу водорода, содержащему большое число протонов. Ситуация будет выглядеть так. В образце из-за усреднения случайных ориентаций спинов примерно равные количества протонов при наложении постоянного внешнего магнитного поля окажутся относительно этого поля со спинами, направленными “вверх” и “вниз”. Облучение образца электромагнитными волнами с частотой = (- )/, вызовет “массовый” переворот спинов (магнитных моментов) протонов, в результате которого все протоны образца окажутся в состоянии со спинами, направленными против поля. Такой массовое изменение ориентации протонов будет сопровождаться резким (резонансным) поглощением квантов (и энергии) облучающего электромагнитного поля. Это и есть ЯМР. ЯМР можно наблюдать лишь в образцах с большим числом ядер (>10^16), используя специальные методики и высокочувствительные приборы.
При динамической поляризации вектор ядерной намагниченности направлен вдоль линий измеряемого магнитного поля. Для возможности снятия полезного сигнала, необходимо повернуть вектор намагниченности на 90 градусов.
Повернуть вектор ядерной намагниченности на 90 градусов можно несколькими способами.
Либо с помощью приемной или вспомогательной катушки наложить перпендикулярно переменному полю дополнительный импульс слабого поля равный частоте прецессии в измеряемом магнитном поле и с длительностью  , где В1 амплитуда вспомогательного магнитного поля.
, где В1 амплитуда вспомогательного магнитного поля.
Либо с помощью импульса магнитной индукции, передний фронт которого имеет время нарастания в 10-20 раз больше чем период прецессии, а задний убывает намного быстрее периода прецессии. При этом направление импульсной магнитной индукции, должно быть перпендикулярно измеряемому магнитному полю, а амплитуда в несколько раз больше измеряемой индукции.
Либо создание на время поляризации вспомогательной магнитной индукции, направленной перпендикулярно к измеряемой и на порядок больше ее. При таком методе ядерная намагниченность сильно возрастает и приводит к существенному увеличению полезного сигнала. Возрастание ядерной намагниченности можно использовать для сокращения времени динамической поляризации, осуществляя поляризацию не до конца, и сократить время измерения. Величина вспомогательной индукции ограничивается возможностью создания в объеме рабочего вещества мощного высокочастотного поляризующего поля, которое уже в поле Земли составляет для соли Ферми 54-57 МГц амплитудой около 100000 nТл.
Здесь показан пример конструкции датчика с несколькими разно осевыми катушками.
Преимущество приборов с динамической поляризацией ядер в том, что они позволяют наблюдать прецессию одновременно с процессом поляризации. Это возможно за счет независимости образования продольной составляющей ядерной намагниченности и прецессионного движения к поперечной составляющей измеряемой магнитной индукции.
Все приборы основанные на измерении прецессии магнитного резонанса дискретны. Максимальная скорость цикла одного измерения около 0,2 сек.
Делаем выводы.
1. Протонный магнитометр Оверхаузера имеет значительные преимущества по сравнению с обычным протонным магнитометром. В нем используется динамическое высокочастотное (ВЧ) возбуждение электронов с одновременной динамической поляризацией протонов в особой среде - растворе свободных радикалов в протон содержащем растворе. В таком растворе свободные радикалы поставляют свободные, не спаренные электроны, которые динамически возбуждаются высокочастотным электромагнитным полем, и захватываются вращающимися протонами. Такая электрон - протонная подсистема обладает дискретными двух спиновыми энергетическими уровнями, при резонансном насыщении которых магнитный спиновый момент начинает преобладать над электрическим, и препятствовать электронному типу связей. Магнето чувствительность динамически поляризованных протонов резко возрастает. В результате раствор становится парамагнитным, и повышено магнето восприимчивым к внешним статическим и динамическим магнитным полям.
2. Уровни возбуждения вышеуказанной двух спиновой, электрон - протонной подсистемы - дискретные, поэтому ее возбуждают на одной из частот электронного парамагнитного резонанса. Энергия возбужденной протон - электронной подсистемы оказывается выше энергии тепловых шумов, в результате чего последние подавляются, и отношение сигнал/шум датчика магнитометра Оверхаузера возрастает над отношением сигнал/шум датчика обычного прецессионного магнитометра примерно в 500 раз. Для дальнейшей импульсной поляризации динамически поляризованных протонов требуется значительно меньшее время и меньшая подводимая мощность, чем при импульсной поляризации обычных протон содержащих жидкостей без динамического ВЧ возбуждения (т. е. при меньших размерах датчика и меньшей подводимой мощности получают гораздо больший уровень полезного сигнала).
3. Недостатками магнитометра Оверхаузера являются ограниченное время жизни специальных протон содержащих растворов (несколько лет), а также некоторая статическая и динамическая погрешность прибора вследствие предварительного ВЧ - возбуждения протонов.
С ув. Белецкий А. И. 06.07.2014г. Кубань Краснодар.